The Complete Beginner’s Guide to Gradient Descent (Beginner-Friendly & Detailed)
Gradient descent is the workhorse behind modern machine learning. In this guide we go slow and logical: first the goal and the idea of a loss, then the gradient and the famous one-line update, then safe learning-rate choices with tiny numeric examples and visuals. Only after that do we introduce practical variants (mini-batches, momentum, Adam) with clear definitions and code you can run.
1) Objective: what are we minimizing?
Plain English. We want the model to make fewer mistakes. We turn “mistakes” into a number called the loss. Lower is better.
- Regression: Mean Squared Error (MSE) \(\; \frac{1}{n}\sum_i (y_i-\hat y_i)^2\).
- Classification: Cross-Entropy (log loss).
- Language models: also Cross-Entropy - predicting the next token.
2) Gradient: which way is downhill?
Idea. The gradient points to the direction of steepest increase. So we walk the opposite way to reduce the loss fast.
3) The update rule (and the famous minus sign)
At step \(t\), with learning rate \(\eta\), take a small step opposite the gradient:
Why minus? Gradients point uphill; we want downhill.
4) Learning rate: how big should the step be?
Heuristic that works: start small, increase until the loss gets bouncy, then back off a bit.
- LR finder: raise \(\eta\) exponentially during a short run; pick the highest \(\eta\) before loss spikes, then divide by 3–10.
- Schedulers: warmup (start small), step decay, cosine decay - helpful once basics work.
5) Tiny 1D example (feel it numerically)
import numpy as np
def f(w): return (w-3)**2
def grad(w): return 2*(w-3)
w, eta = 10.0, 0.1
for step in range(12):
w -= eta * grad(w)
print(f"step {step:2d}: w={w:6.3f} loss={f(w):7.4f}")Try \(\eta=1.2\) to see divergence - useful for intuition.
6) Visual intuition (contour map)
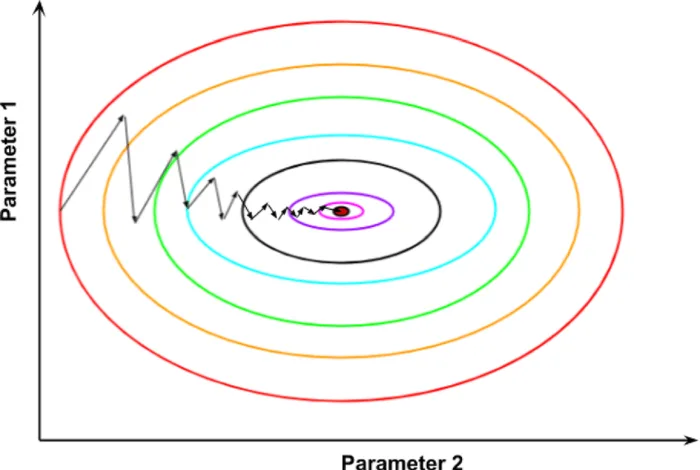
Reading the map. Lines are equal-loss contours; arrows point down (opposite gradient). In narrow valleys, steps can zig-zag - later we’ll fix this with momentum.
7) Scaling & conditioning (why standardize features)
When features have very different scales (e.g., age vs income), the loss “bowl” is stretched - some directions are steep, others flat. Gradient descent then zig-zags and needs a tiny \(\eta\). Standardizing inputs (zero mean, unit variance) makes the bowl rounder and training smoother.
8) Mini-batches & Stochastic Gradient Descent (now that GD is clear)
Full-batch gradient uses all \(n\) examples every step - accurate but slow. Stochastic GD uses one example - fast but very noisy. Mini-batch (e.g., 64–256 samples) balances speed and stability.
The noise in \(g_t\) can help escape saddles and poor local minima.
9) Momentum: keep some of your previous direction
Intuition. If you’ve been moving east, don’t instantly stop unless the slope forces you. Momentum damps zig-zags in narrow valleys.
Nesterov momentum peeks ahead a little before taking a step - often slightly better in practice.
10) Adam: momentum + adaptive per-parameter step sizes
Idea. Keep a moving average of gradients (like momentum) and also of squared gradients to scale each parameter’s step. Parameters with noisy gradients get smaller steps.
Popular defaults: \(\beta_1=0.9,\;\beta_2=0.999,\;\epsilon=10^{-8},\;\eta=10^{-3}\).
11) Hands-on: logistic regression trained with gradient descent
import numpy as np
from sklearn.datasets import make_classification
from sklearn.preprocessing import StandardScaler
# 1) Toy data
X, y = make_classification(n_samples=400, n_features=2, n_redundant=0,
n_clusters_per_class=1, random_state=0)
scaler = StandardScaler()
X = scaler.fit_transform(X)
X = np.c_[np.ones(len(X)), X] # add bias column of ones
# 2) Model & helpers
w = np.zeros(X.shape[1])
def sigmoid(z): return 1/(1+np.exp(-z))
def loss(w):
z = X @ w
p = sigmoid(z)
eps = 1e-9
return -np.mean(y*np.log(p+eps) + (1-y)*np.log(1-p+eps))
def grad(w):
z = X @ w
p = sigmoid(z)
return X.T @ (p - y) / len(y)
# 3) Train
eta = 0.2
for step in range(800):
w -= eta*grad(w)
if step % 100 == 0:
print(f"step {step:4d} loss={loss(w):.4f}")
print("weights:", w.round(3))What you should see. Loss drops quickly then stabilizes; if it oscillates, lower \(\eta\); if it barely moves, increase \(\eta\) a bit.
12) Diagnosing training curves (simple rules)
- Loss barely moves: raise \(\eta\) (×2), standardize inputs, or try momentum \(0.9\).
- Loss explodes/NaN: lower \(\eta\); clip gradients; check for bad labels or log(0).
- Loss zig-zags: lower \(\eta\) slightly or add momentum; consider Adam.
- Train ↓, Val ↑: overfitting - use regularization (e.g., L2), reduce capacity, or early stopping.
13) Just enough theory (why steps reduce loss)
If the gradient is Lipschitz-continuous with constant \(L\) and \(0<\eta<2 /L\), each step decreases the loss unless you’re at a flat optimum:
For a 1D quadratic \(f(w)=\tfrac{a}{2}(w-w^\star)^2\), the update is \(w_{t+1}-w^\star=(1-\eta a)(w_t-w^\star)\). Convergence requires \(|1-\eta a|<1\Rightarrow 0<\eta<2/a\).
14) A tidy training loop (pseudo)
# Pseudo-code for a robust loop
init θ
optimizer = Adam(η=1e-3) # or SGD+momentum once you’re comfortable
for epoch in range(E):
for (x, y) in dataloader: # mini-batches
y_hat = model(x, θ)
L = loss(y_hat, y)
g = ∇θ L # backprop computes this in frameworks
θ = optimizer.update(θ, g)
# evaluate on validation set
# adjust η with a scheduler if needed
# early stop if validation loss worsens for K epochs15) Video: 3Blue1Brown on gradient descent
16) Glossary (jargon → plain English)
- Loss function - number measuring how wrong the model is.
- Gradient - direction of steepest loss increase.
- Learning rate (η) - step size each update.
- Mini-batch - small subset used to estimate gradient quickly.
- Momentum - moving average of gradients to smooth updates.
- Adam - optimizer combining momentum + adaptive steps.
- Conditioning - how stretched the loss bowl is; bad conditioning slows GD.
- Scheduler - planned changes to \(\eta\) over training.
17) References & Further Reading
- 3Blue1Brown. “Gradient descent, how neural networks learn.” (YouTube).
- Ruder, S. “An Overview of Gradient Descent Optimization Algorithms.” arXiv:1609.04747.
- Goodfellow, Bengio, Courville. Deep Learning, Ch. 8 (Optimization).
- Wikipedia: Gradient Descent, Stochastic GD, Adam.
18) FAQ
Q1. How do I pick a learning rate without guessing?
Use an LR finder: start tiny, increase \(\eta\) exponentially, plot loss vs \(\eta\), pick the largest value before the curve turns up, then divide by 3–10.
Q2. Should I always use Adam?
Adam is great for noisy/sparse gradients and fast starts. For some vision tasks, well-tuned SGD+momentum can match or beat final accuracy. Try Adam first, then compare.
Q3. My loss is NaN - why?
Usually too-large \(\eta\) or invalid math (e.g., log(0)). Lower \(\eta\), standardize inputs, add gradient clipping (e.g., clip global \(\ell_2\) norm to 1), add small eps where needed.
Q4. Does batch size matter?
Yes: larger batches give stabler gradients but may need warmup and schedule tweaks; smaller batches add helpful noise and can generalize well. Start with 64–256.
Comments